Temps de cycle réduit
Les meilleures performances de fonctionnement de la classe ont été obtenues grâce à l’utilisation de servomoteurs hautes performances et d’une technologie de commande unique développée par Mitsubishi Electric.
- Sortie de couple élevé à vitesse de rotation élevée, réduisant le temps d’accélération/décélération
- Temps de positionnement réduit pour un rendement amélioré du dispositif
- Fonctionnement en continu amélioré
Performances d'outillage améliorées
Acheminement interne du câblage
- Acheminement interne des câbles et des flexibles pneumatiques
- Pas d’interférence de câbles autour des dispositifs
- Risque de débranchement de câblage limité
- Des modèles RV avec câblage interne et flexibles acheminés jusqu’au préhenseur (-SHmm) sont proposés en option
Câble Ethernet interne
Installation interne du câblage et des tuyauteries assurée pour la connexion de capteurs de vision.
- Préhenseur : 8 entrées/8 sorties
- Câble Ethernet pour le capteur de vision
- Câbles supplémentaires destinés à la commande des systèmes de vision ou d’autres capteurs
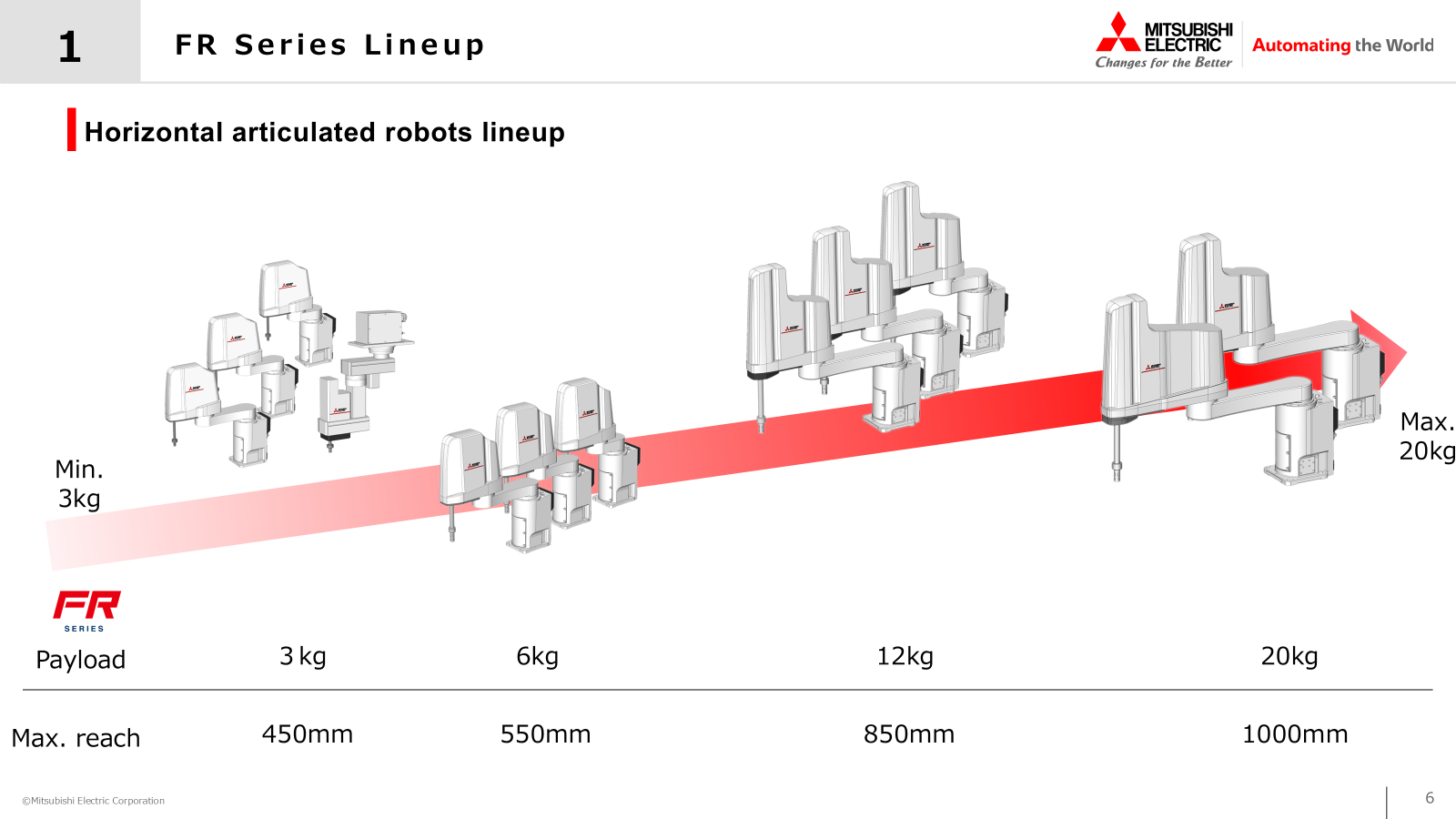
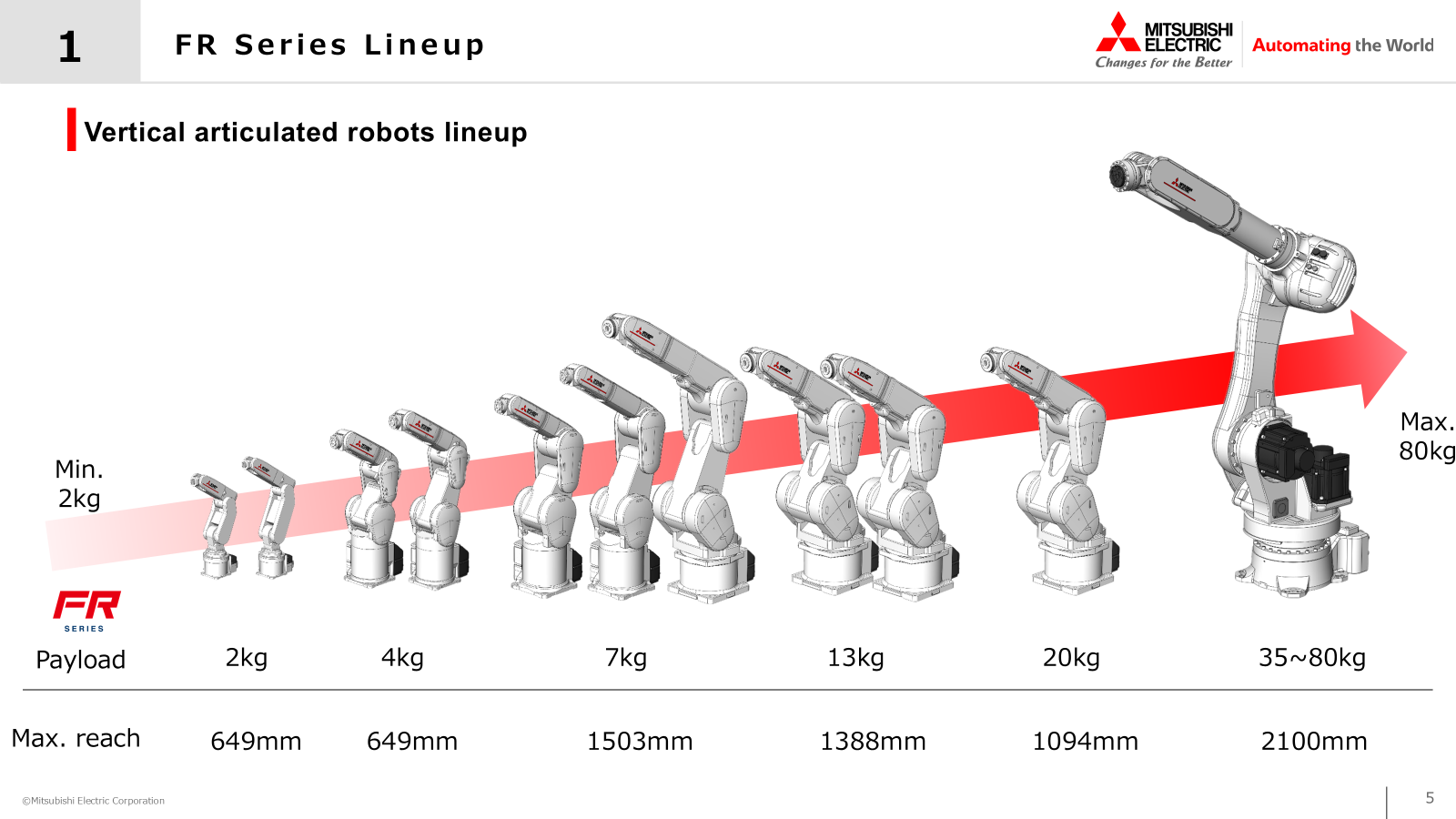
Utilisation optimale de l'espace d'installation
Plage de fonctionnement étendue
- Flexibilité améliorée pour l’intégration du robot
- Utilisation optimisée de l’espace d’accès sur tout le périmètre
- Distances de mouvement raccourcies, permettant de réduire les temps de cycle
Connexion à des dispositifs périphériques
Capteur de vision de réseau
Le robot et la caméra peuvent facilement être étalonnés simultanément par un processus simple, en utilisant les outils de configuration du capteur de vision.
- Connexion simple entre le robot et la caméra via Ethernet
- Commande simple en utilisant les instructions de contrôle de vision
- Temps de cycle réduits
- Coûts de système limités
Suivi du convoyeur
Le transport, l’alignement, et les travaux de montage, etc. peuvent être exécutés pendant le suivi de pièces par le robot.
- Rendement accru des composants
- Programmation simple (MELFA BASIC V/VI)
- Pas besoin de dispositif de positionnement supplémentaire
- Prédiction de la position de la pièce pour des temps de cycle réduits
- Suivi de trajectoire circulaire disponible
Axes supplémentaires
Le projet global peut être configuré de manière à inclure l’axe de déplacement du robot et du plateau rotatif ainsi que des machines du client distinctes du robot telles que les chargeurs, et des dispositifs de positionnement.
- Jusqu’à 8 axes supplémentaires peuvent être commandés par le contrôleur
- Aucun matériel de commande de déplacement supplémentaire n’est nécessaire
- Compatibilité plug-and-play avec servos MELSERVO (MR-J4-B)
- Deux axes peuvent être commandés de manière simultanée avec le robot
- Pas besoin de connaissances préalables en programmation, car le logiciel robot est utilisé.